
Partnerschaften und netzwerke
iNNOVATIONEN ENTSTEHEN IN KOOPERATION
Das Systems and Control Innovation Lab (SCIL) ist ein integraler Bestandteil des DLR-Instituts für Systemdynamik und Regelungstechnik. Neben den eigenen Experten/innen kann das SCIL auf über 50 Experten/innen in den Bereichen Simulation, Modellierung, Regelungstechnik sowie Optimierung zugreifen, darunter sind Spezialisten/innen in Domänen wie Robotik, Luft- und Raumfahrt und Automotive.
Enge Partnerschaften mit Universitäten wie der TUM oder der UniBW sowie mit großen Technologienetzwerken und regionalen Clustern wie Bayern Innovativ, Mechatronik & Automation, Zentrum Digitalisierung Bayern, Munich Aerospace oder bavAIRia ermöglichen einen breiten akademischen und industriellen Austausch. Darüber hinaus ist das SCIL als Helmholtz Innovation Lab deutschlandweit mit einer Vielzahl unterschiedlichster Forschungseinrichtungen vernetzt. Die Zusammenarbeit mit der Industrie hat am Institut eine lange Tradition. Zu den Partnern zählen führende Weltkonzerne und Großunternehmen ebenso wie kleine und mittlere Unternehmen (KMU).
Laufende Forschungsvorhaben
Laufende Forschungs-vorhaben des SCIL
Factory of the Future
intelligente Roboter für die digitale Produktion
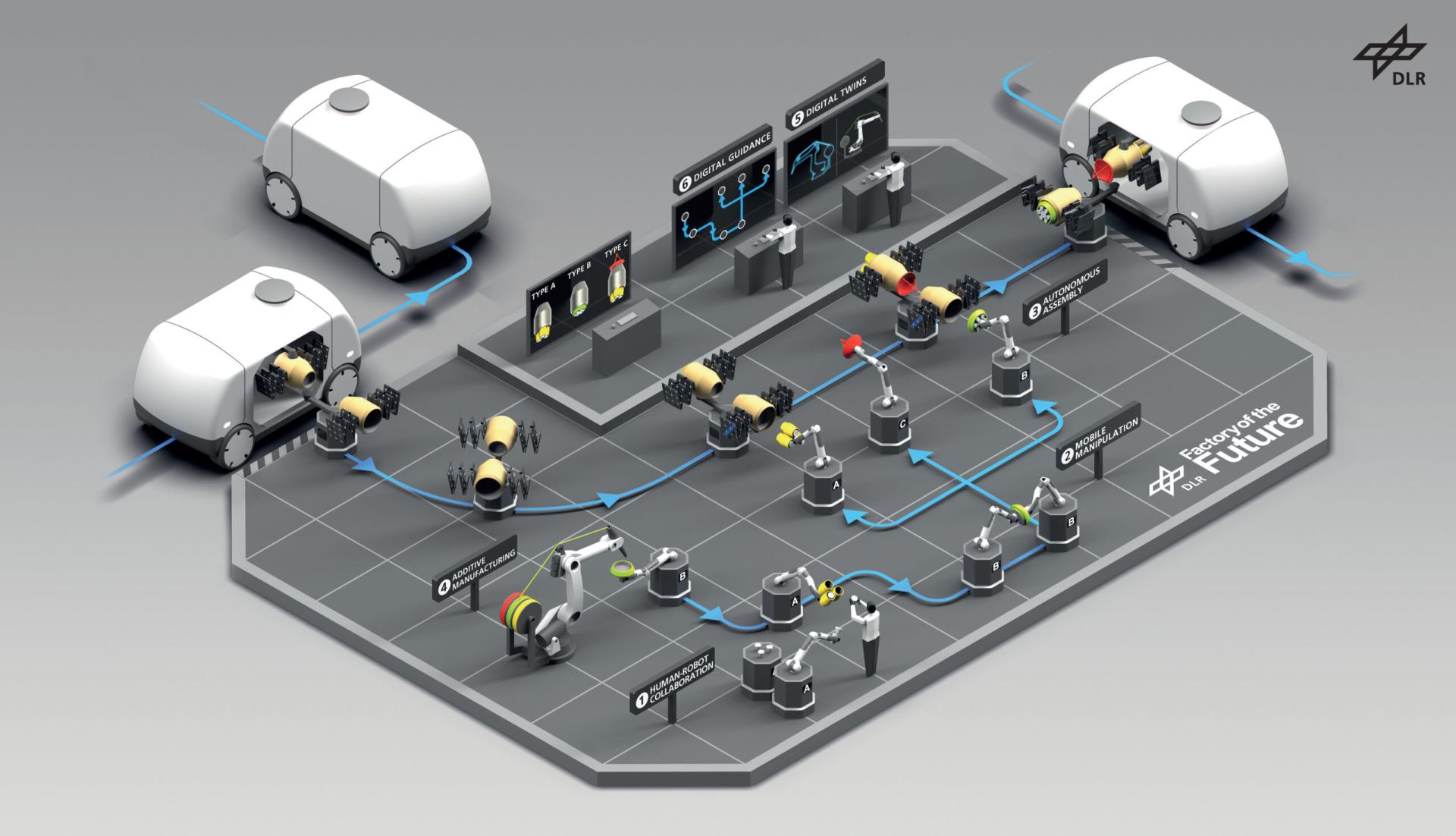
Factory of the Future – die Fabrik der Zukunft – ist ein gemeinschaftliches Projekt mehrerer Forschungsinstitute des Deutschen Zentrums für Luft- und Raumfahrt (DLR). Das Ziel ist die digitale Transformation robotergestützter Produktionsprozesse im Rahmen der Industrie 4.0. Die Initiative des DLR verfolgt mit dem Projekt eine umfassende Strategie, indem sie Zukunftstechnologien und Ansätze aus der Forschung zu künstlicher Intelligenz und kooperativen Robotern untersucht.
Das Institut für Systemdynamik und Regelungstechnik forscht im Factory of the Future Projekt im Bereich „Digitale Zwillinge von Produkten und Produktfamilien in industriellen Betrieben“. Hochdetaillierte digitale Modelle stellen sowohl das Produkt als auch den optimierten Produktionsprozess dar und überwachen Bauteil- und Fertigungsprozess in Echtzeit. Ein weiteres Ziel ist die Entwicklung von Methoden zur hochdetaillierten virtuellen Inbetriebnahme des Produktionsprozesses.
Prodigies
effizienter flugzeugbau mit autonomen robotern
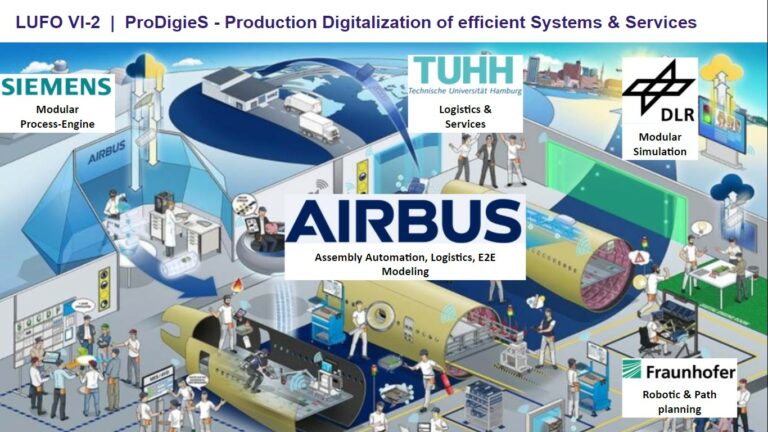
Im Verbundprojekt „Prodigies“ erarbeiten die Partner Siemens AG, Fraunhofer IFAM, DLR und TUHH unter der Leitung von Airbus gemeinsam Lösungen, wie durch den Einsatz intelligenter, vernetzter und modularer Robotersysteme die Effizienz in der Flugzeugproduktion gesteigert werden kann. Das DLR-Institut für Systemdynamik und Regelungstechnik steuert Simulationskomponenten zur virtuellen Produktionsanlage bei, die es den Projektpartnern ermöglichen, Teile der Anlage vorab simulativ zu bewerten. Insbesondere die Lokomotion und Manipulator-Auslegung kann in der Simulation frühzeitig abgesichert werden. Darüber hinaus werden Simulationsmodelle für die Anlagensimulation sowie dazugehörige Visualisierungsmodelle entwickelt. Die Modelle sollen genutzt werden, um die virtuelle Inbetriebnahme direkt aus der Anlagensteuerung heraus zu demonstrieren sowie zur Vorabsimulation von Prozessschritten.

KiRis
früherkennung von reisekrankheit bei piloten
Ungefähr 10 bis 20 Prozent der Pilotenanwärter/innen zeigen während der fliegerischen Ausbildung Symptome von Kinetose (umgangsprachlich Reisekrankheit). Doch wie lässt sich feststellen, ob ein/e Ausbildungskandidat/in anfällig für Kinetose ist? Gibt es allgemeine psychophysiologische Anzeichen, an denen sich das Risiko ablesen lässt? Diesen Fragen gehen Forschende des Fraunhofer FKIE (Projektleitung), der Universität der Bundeswehr München und des DLR-Instituts für Systemdynamik nach. In einem gemeinsamen Forschungsprojekt wird eine KI- und simulatorgestützte Methode zur Früherkennung des Kinetose-Risikos (KiRis) entwickelt. Für die praktischen Untersuchungen stellt das DLR einen Simulator und ein Motion Cueing System zur Verfügung, in dem die Versuchspersonen in Szenarien getestet werden, die von der Universität der Bundeswehr München entwickelt werden. Das Fraunhofer FKIE stellt die Kinetosen wissenschaftlich dar und wählt geeignete physiologische Parameter für deren Vorhersage aus. Mit Methoden des maschinellen Lernens sollen Risikofaktoren identifiziert und anhand dieser ein Modell zur möglichst zuverlässigen Vorhersage von Kinetosen entwickelt werden.
MRK STUCK
Mensch-Roboter-Kollaboration (MRK) im handwerk
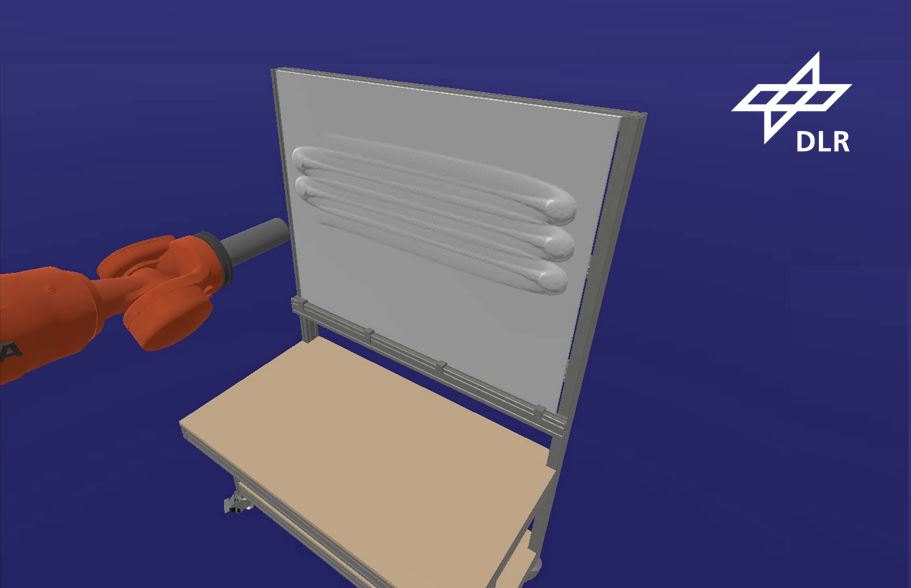
Um die Potenziale der Mensch-Roboter-Kollaboration (MRK) im Handwerk zu erschließen, entwickeln die Forschungspartner im Verbundprojekt „MRK Stuck“ eine Roboter-Systemlösung für Handwerksarbeiten im Stuckateurgewerbe. Durch den Einsatz von Hochtechnologien wie Sensorik, Roboterperzeption und Künstliche Intelligenz sollen die Stuckateurarbeiten künftig teilautonom oder kollaborativ ausgeführt werden können, was gleichzeitig auch zu einer Verbesserung der Qualität und Wirtschaftlichkeit führen soll. Neben dem DLR-Institut für Systemdynamik sind die Universität der Bundeswehr, die Maxit GmbH, die W-T-P Kroiher & Ober GmbH sowie die Berufsförderungsgesellschaft mbH am Projekt beteiligt.
ABGESCHLOSSENE Forschungsvorhaben
ABGESCHLOSSENE Forschungs-vorhaben des SCIL
MFLEX
virtuelle Inbetriebnahme in der Luftfahrt
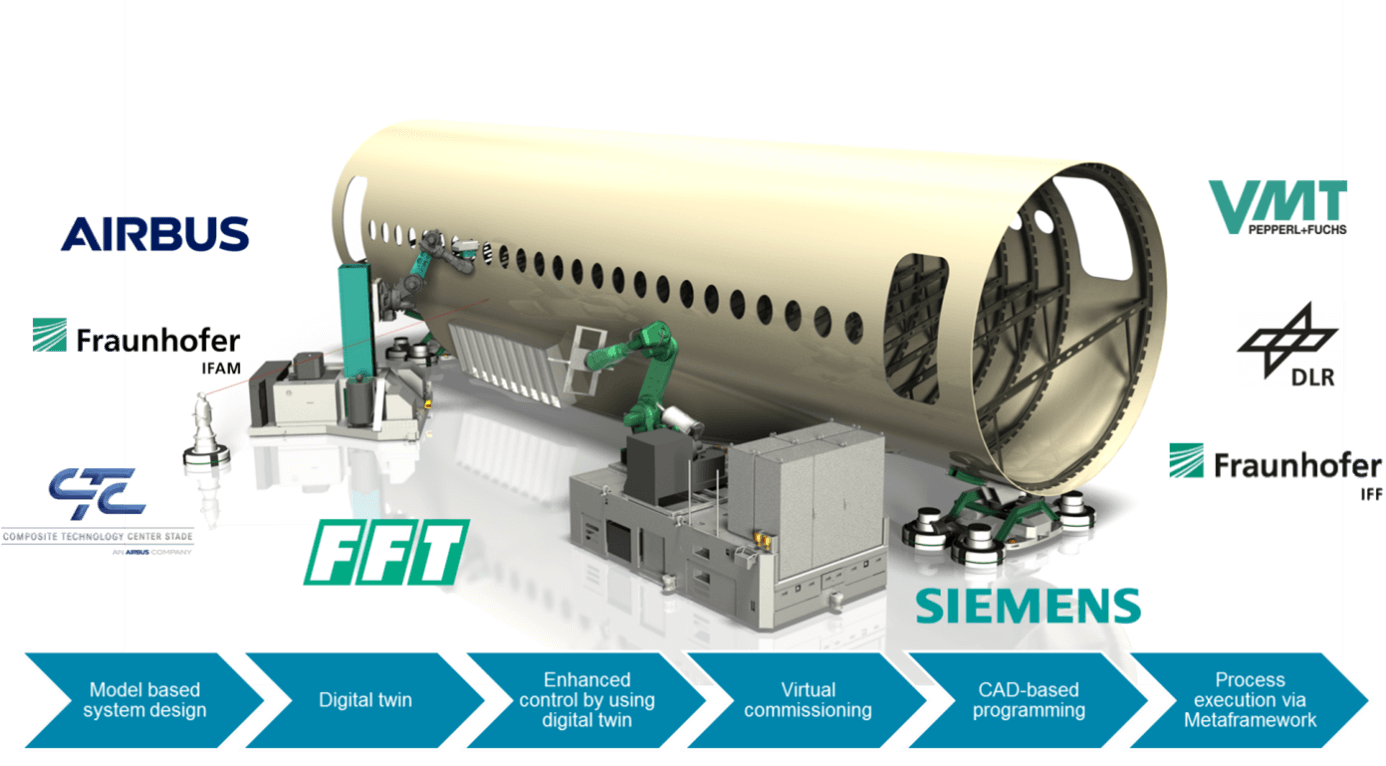
Mit dem Projekt MFlex (Mobile Robotereinheiten für die flexible und ressourceneffiziente Flugzeugproduktion 2025) konnte ein wichtiger Beitrag zur intelligenten Automatisierung im Flugzeugbau geleistet werden. Ziel des Vorhabens war es, Konzepte und Technologien zur robotischen Automatisierung von Prozessen in der Flugzeugproduktion zu entwickeln, um Kosten zu senken und die Produktionskapazität zu erhöhen. Das SCIL entwickelte zusammen mit seinen Partnern Airbus, Fraunhofer IFF, Fraunhofer IFAM, Siemens, FFT, 3D Aero und Espace2000 Methoden für modulare, flexibel einsetzbare Produktionssysteme. Das SCIL war insbesondere beteiligt bei der Analyse und prototypischen Entwicklung der benötigten Simulationsmodelle für die virtuelle Inbetriebnahme, sowie bei der Definition von Kriterien für den erfolgreichen Simulations-Modellaustausch zwischen Zulieferern und Integratoren. Weitere Informationen
Lighthouse
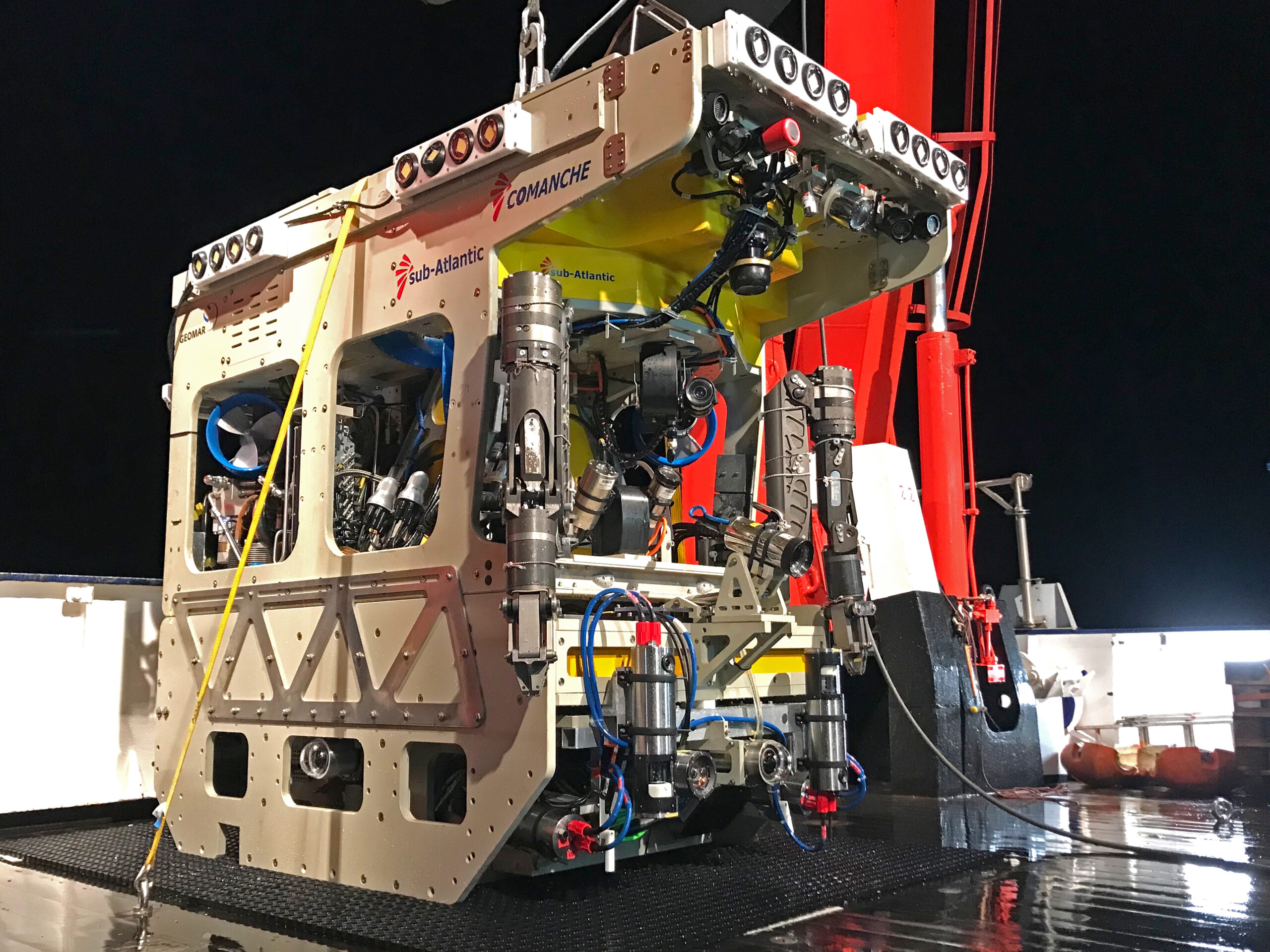
ECHTZEIT-visualisierungsystem für TAUCHROBOTER
Ziel des Helmholtz Validierungsfonds-Projektes Lighthouse war es, die Umgebung, in der sich Tauchroboter (ROV, AUV) bewegen, in Echtzeit zu kartieren. Auf Basis von GEOMAR-Patenten und kommerzieller Unterwassersensorik haben die Forschenden ein integriertes Echtzeit-Tiefseevisualisierungssystem entwickelt – quasi das „Google Street View Auto“ der Tiefsee. Dieses besteht aus einem Sensorikpaket auf dem Tauchfahrzeug, das auf Basis optischer und akustischer Technologien (Kameras, Beleuchtungstechnik, Sonare, Laserscanner) die Umgebung in alle Richtungen scannt. Daraus wird in Echtzeit ein 3D-Geländemodell als auch eine panoramische, stereoskopische, fotorealistische Ansicht aus einer frei wählbaren Perspektive errechnet. Die zweite Komponente ist ein Echtzeit-Visualisierungssystem, welches an Bord oder über Internet die gewonnenen Daten sowie Metadaten (Navigation, Probenpunkte) darstellt. Hierbei kommen immersive Technologien wie VR und AR zum Einsatz. Diese Software wurde vom Systems & Control Innovation Lab entwickelt.